.png)
NovaSys delivers a full portfolio of high-precision, high-stability, cost-effective MEMS INS, including MEMS IMUs, MEMS AHRS, MEMS INS/GNSS integrated systems, positioning and orientation systems, and scene matching navigation modules. Designed for UAVs, autonomous vehicles, marine, automotive, and industrial robotics, our solutions ensure reliable, uninterrupted navigation performance even in GNSS-denied environments, enabling scalable, mission-critical deployments.
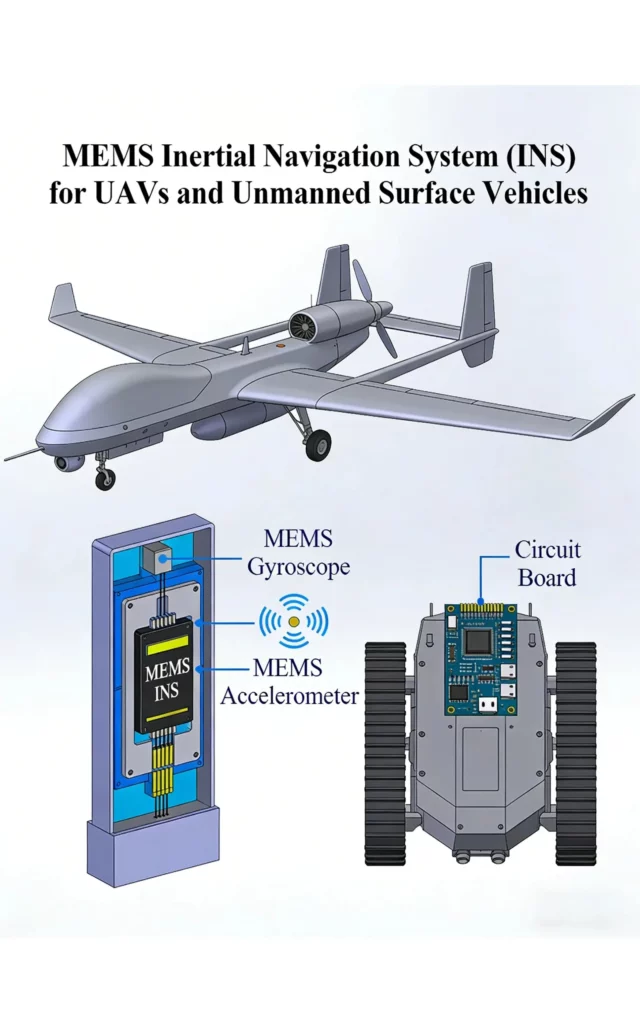
The MEMS INS is essential for accurate positioning in various applications.

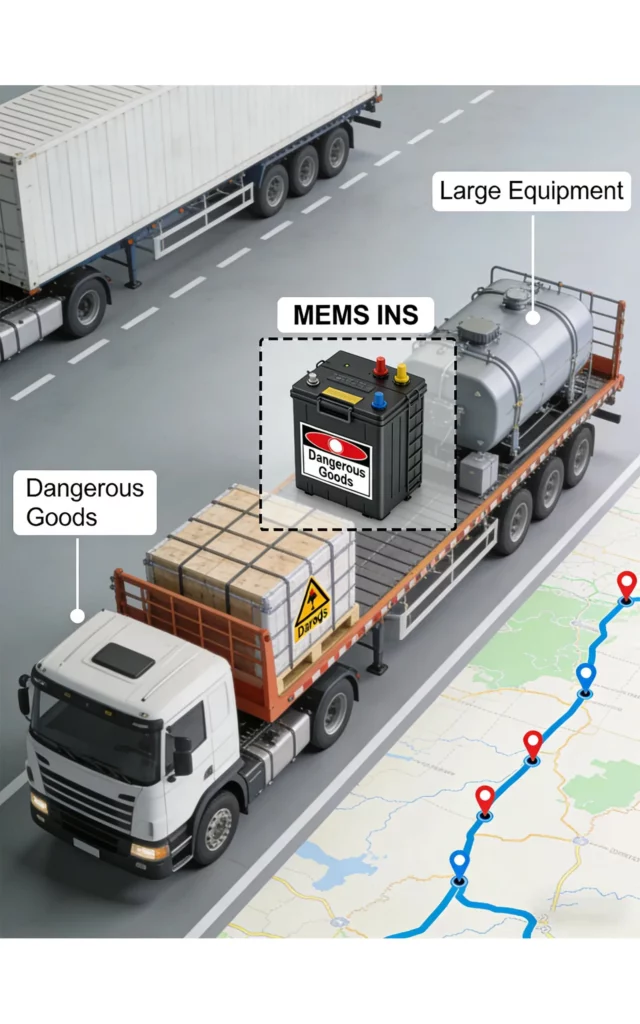
The system uses a Kalman filter to fuse inertial navigation attitude/acceleration data, odometer wheel speed and displacement, and 3D ground velocity from speed radar. This multi‑sensor integration forms the core of high‑precision state estimation.
It dynamically compensates for wheel slip and inertial drift, and automatically switches to radar data when wheel speed is unreliable on low‑traction roads. This ensures stable, long‑term positioning accuracy in harsh driving conditions.
This innovative MEMS INS enhances data accuracy in challenging environments.

We have optimized the boundary conditions for inertial-visual error calibration and adopted commercial-grade chips to reduce costs, thereby enabling the large-scale deployment of UAVs in the low-altitude economy.
The integration of a MEMS INS allows for superior navigation capabilities.

This system tightly couples inertial navigation attitude data with DVL velocity vectors to effectively suppress inertial drift. In addition, it fuses magnetic sensor data with pre-stored geomagnetic maps to provide absolute position anchoring, correcting long-term accumulated errors and heading deviations, thus enabling reliable underwater/surface dead reckoning.
By using a MEMS INS, we can achieve highly accurate underwater navigation.
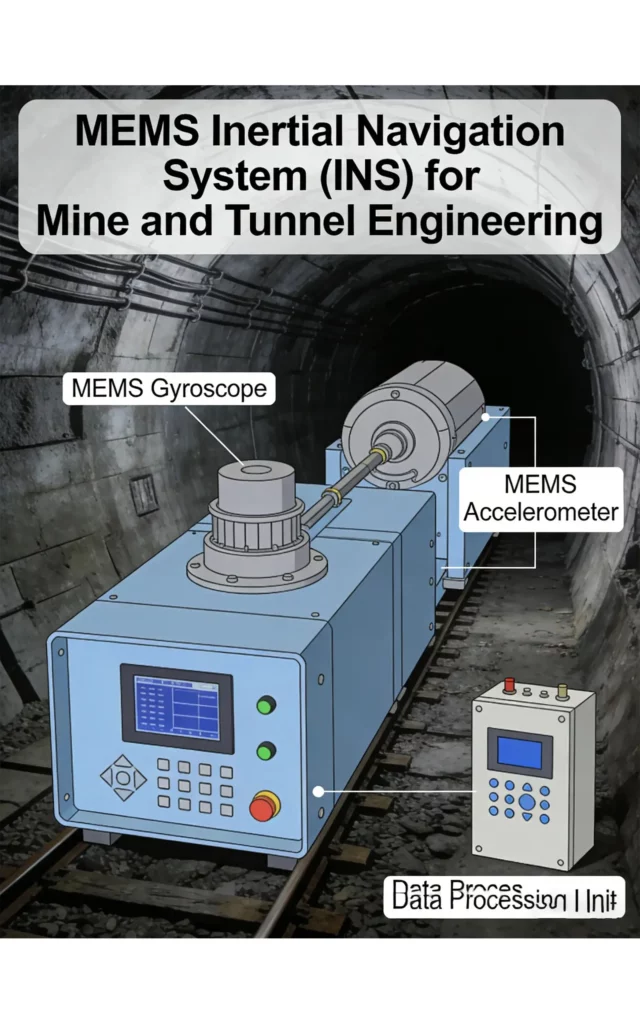
This high-precision, cost-effective FOG & MEMS INS/GNSS system integrates a FOG & MEMS IMU, GNSS receiver, and advanced navigation algorithms to output accurate position, velocity, and attitude data. Its dual‑mode architecture ensures stable, continuous navigation even in GNSS‑challenged environments like urban canyons, tunnels, and dense vegetation, offering an excellent cost‑performance ratio.
Suitable for mainstream industrial applications, it is widely used in UAVs, AGVs, marine navigation, precision agriculture, surveying, and robotics, delivering reliable high‑precision positioning and orientation for critical operations.
The MEMS INS/GNSS integrated navigation solutions include the following high-performance models:
This high-precision, high-stability, cost-effective MEMS positioning and orientation system is centered on ultra-precise attitude measurement, with integrated self-alignment (self-north-finding) capability, and supports compatibility with external odometers for reliable dead reckoning. It delivers exceptional stability and reliability, ensuring consistent performance even in challenging operational environments, while maintaining an optimal cost-performance ratio for industrial and automotive deployments.
Widely recognized as a benchmark for high-precision automotive applications, it is also ideal for precision agriculture, land surveying, intelligent transportation, industrial robotics, and vehicle-mounted navigation, providing accurate positioning and orientation for mission-critical operations.
This high-precision, high-stability, cost-effective MEMS Inertial Measurement Unit (IMU) delivers raw 3-axis gyroscope (angular rate) and 3-axis accelerometer (linear acceleration) data. Designed without a built-in navigation solution, it offers flexible integration with external navigation algorithms to meet diverse application requirements, while maintaining exceptional stability and an optimal cost-performance ratio for industrial and tactical deployments.
Ideal for a wide range of mainstream industry applications, it is widely used in industrial robotics, unmanned systems, precision instrumentation, platform stabilization, and tactical navigation, providing reliable inertial sensing for high-performance motion control and orientation tasks.
This high-precision, high-stability, cost-effective MEMS AHRS/North Finder integrates a high-performance MEMS IMU with advanced attitude and heading calculation algorithms, directly outputting pitch, roll, and heading data. Select models feature precision north-finding capability, delivering reliable orientation performance even in challenging environments while maintaining an optimal cost-performance ratio for industrial and tactical deployments.
Widely used across mainstream industries, it is ideal for unmanned systems, platform stabilization, marine navigation, precision agriculture, land surveying, and tactical vehicle navigation, providing accurate attitude and heading data for mission-critical orientation tasks.

This high-precision, high-stability, and cost-effective scene matching navigation module leverages advanced visual map matching technology to deliver reliable positioning data. As a key component of our visual-inertial integrated navigation solution, it seamlessly interfaces with external MEMS IMUs, significantly enhancing navigation robustness and accuracy. It provides uninterrupted performance even in GNSS-challenged or harsh visual environments.
The module is ideal for Unmanned Aerial Vehicles (UAVs), industrial drones, and autonomous aircraft, serving as a critical visual navigation supplement to ensure mission-critical reliability for high-risk operations.
