Multi‑Sensor Fusion Navigation Industrial | Consumer Grade High Precision | High Stability | High Cost‑Effectiveness
Four Core Strengths That Define MEMS Inertial Navigation Excellence
High Precision
North Seeking: 0.5*sec(L)
Dynamic DR: ≤0.5°
Gyro Bias (Allan): ≤0.01°/h
High Integration
Min. 22×22×10mm
Min. Weight ≤10g
Power ≤3W
High Expandability
Multi-Carrier Compatibility
Multi-Interface (RS-422/232/CAN)
Customizable (Sampling/Algorithm)
High Stability
-45℃~+80℃ Cal
1000g Shock | 6g Vibration
≤0.5°/h Heading Hold
High Stability
-45℃~+80℃ Cal
1000g Shock | 6g Vibration
≤0.5°/h Heading Hold
High Integration
Min. 22×22×10mm
Min. Weight ≤10g
Power ≤3W
High Precision
North Seeking: 0.5*sec(L)
Dynamic DR: ≤0.5°
Gyro Bias (Allan): ≤0.01°/h
High Expandability
Multi-Carrier Compatibility
Multi-Interface (RS-422/232/CAN)
Customizable (Sampling/Algorithm)
MEMS INS Solutions for Land, Aerial and Maritime Applications
Multi-Sensor Fusion Positioning and Navigation Solution
The MEMS inertial navigation system is essential for accurate positioning in various applications.
This system synchronously fuses the attitude and acceleration data from inertial navigation, the wheel speed and displacement increment data from the odometer, as well as the 3D ground velocity vector from the speed radar via the Kalman filter algorithm. This enables the system to dynamically compensate for wheel slip and inertial drift, and automatically switch to radar data when wheel speed data becomes unreliable on low-traction road surfaces, thereby ensuring long-term positioning accuracy.
This innovative MEMS inertial navigation system enhances data accuracy in challenging environments.
Visual-Inertial Fusion Navigation Solution
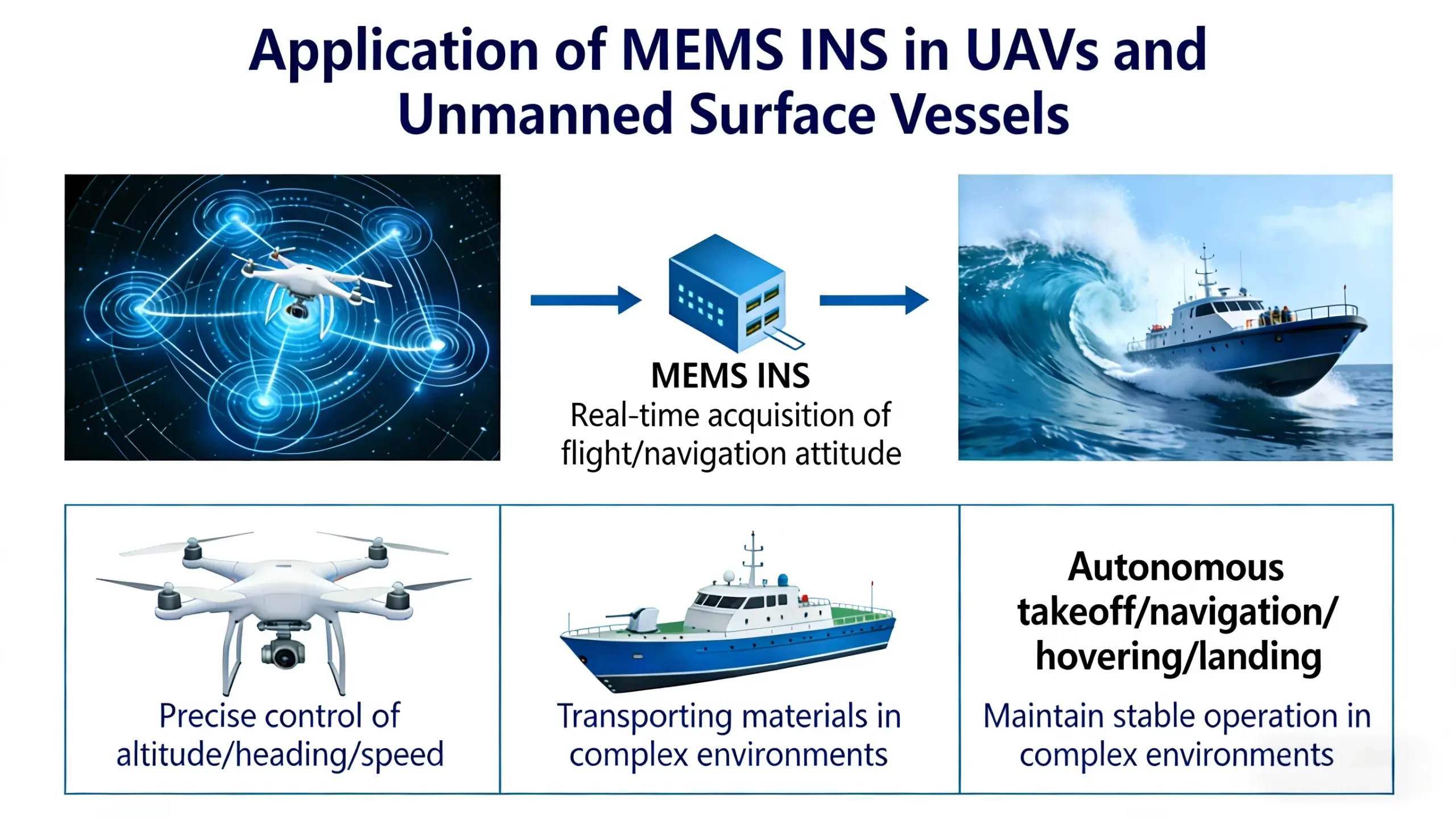
We have optimized the boundary conditions for inertial-visual error calibration and adopted commercial-grade chips to reduce costs, thereby enabling the large-scale deployment of UAVs in the low-altitude economy.
The integration of a MEMS inertial navigation system allows for superior navigation capabilities.
Multi-Sensor Integrated Navigation and Positioning Solution
This system tightly couples inertial navigation attitude data with DVL velocity vectors to effectively suppress inertial drift. In addition, it fuses magnetic sensor data with pre-stored geomagnetic maps to provide absolute position anchoring, correcting long-term accumulated errors and heading deviations, thus enabling reliable underwater/surface dead reckoning.
By using a MEMS inertial navigation system, we can achieve highly accurate underwater navigation.
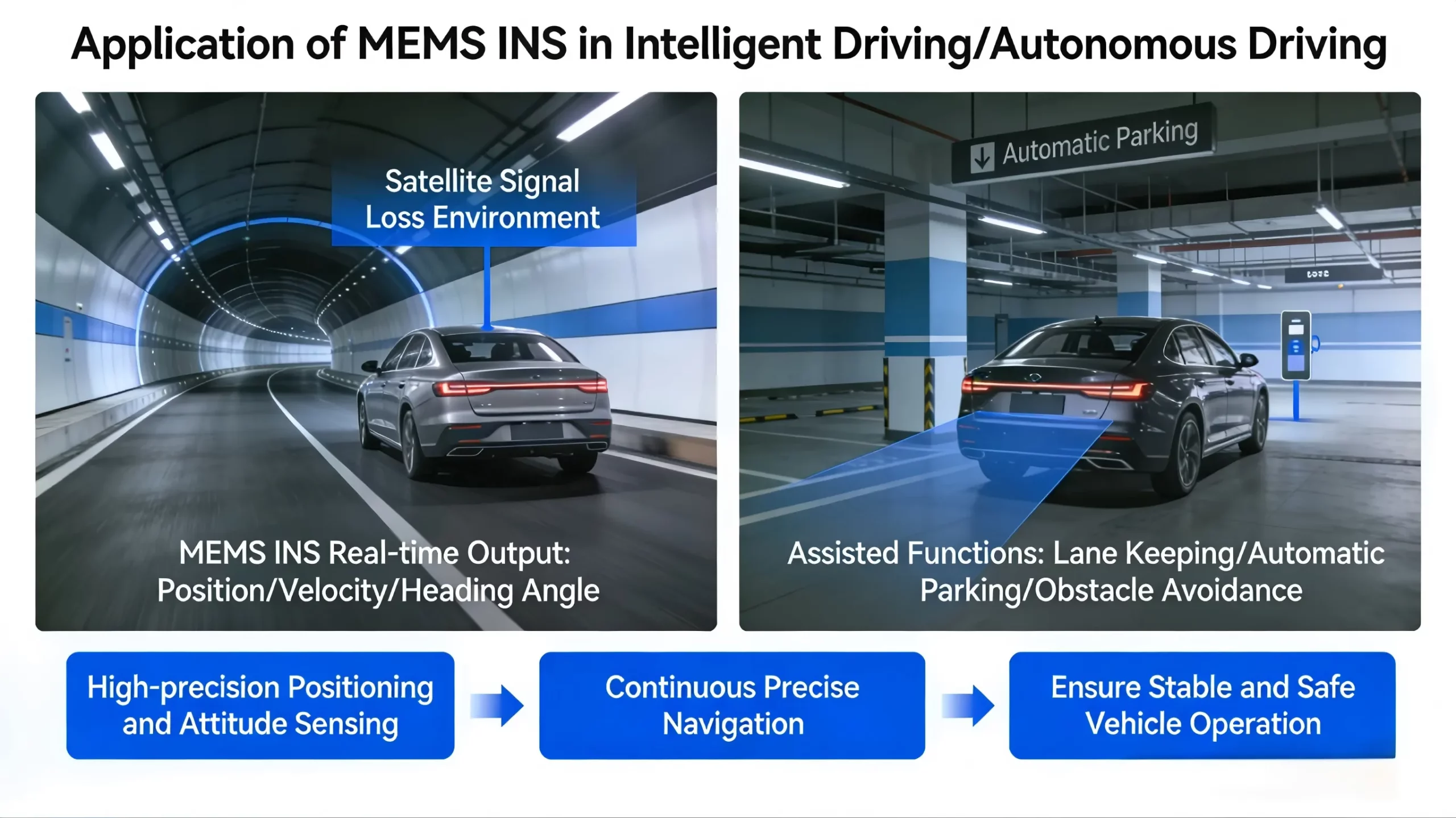
This system integrates an inertial navigation system, a global navigation satellite system receiver, and a fusion algorithm. It delivers full high-precision position, velocity, and attitude (PVA) data, and maintains stable and reliable navigation even in GNSS‑challenged or signal‑obstructed environments.
This MEMS inertial navigation system guarantees performance even in signal-blocked scenarios.
Integrating a high-performance IMU and a navigation solver, it outputs Position, Velocity, and Attitude (PVA) data, with built-in support for north-finding and dead reckoning.
The MEMS inertial navigation system provides essential support for autonomous vehicles.
It integrates a 3-axis gyroscope and a 3-axis accelerometer, only outputs raw inertial data, and provides basic inertial sensing for high-level systems.
Raw data from a MEMS inertial navigation system is crucial for advanced applications.
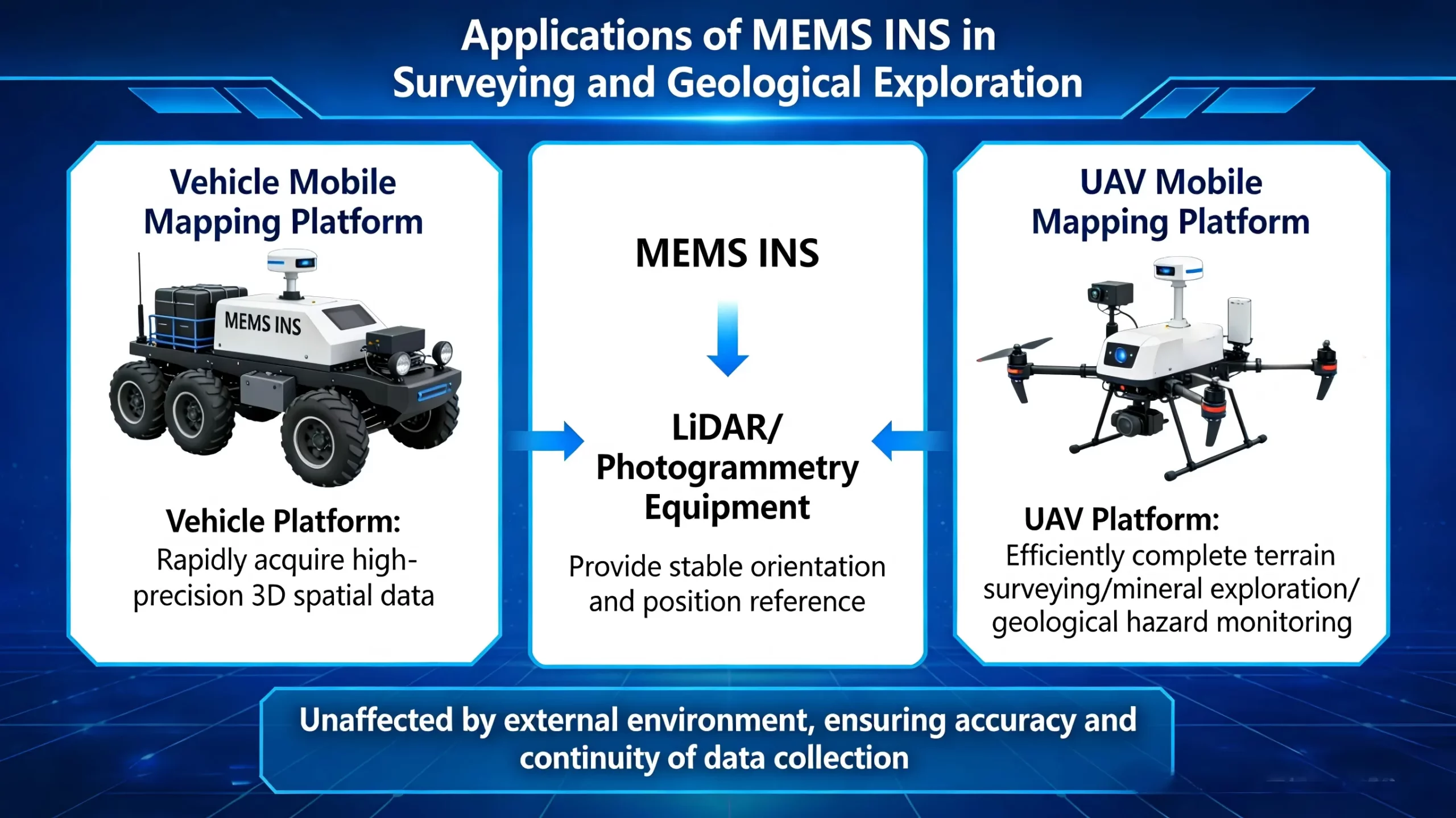
Adopting visual/map matching positioning technology, it provides auxiliary navigation for IMU/INS systems and enhances navigation robustness in complex scenarios.
Incorporating MEMS inertial navigation system technology improves navigation in complex environments.
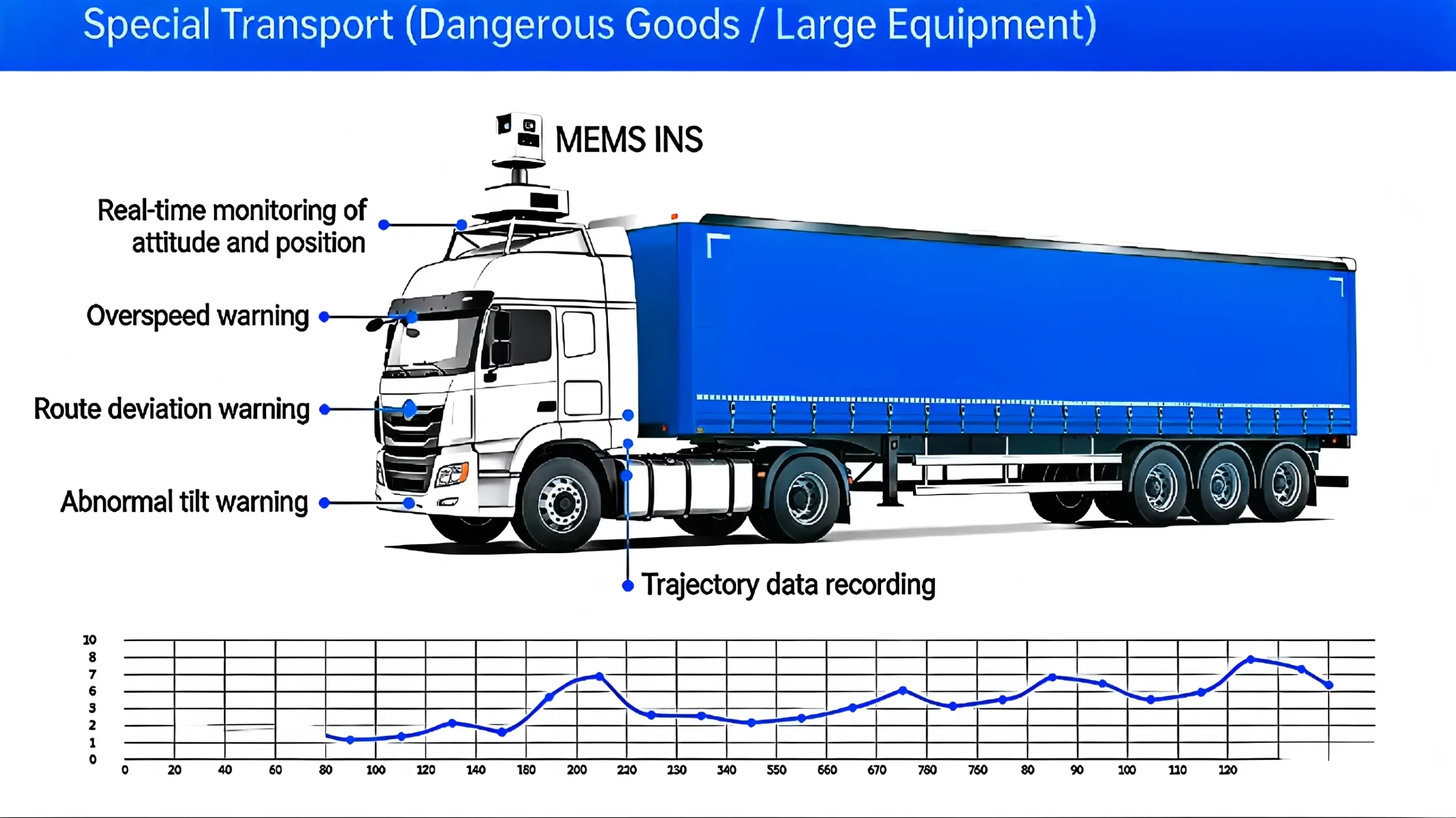
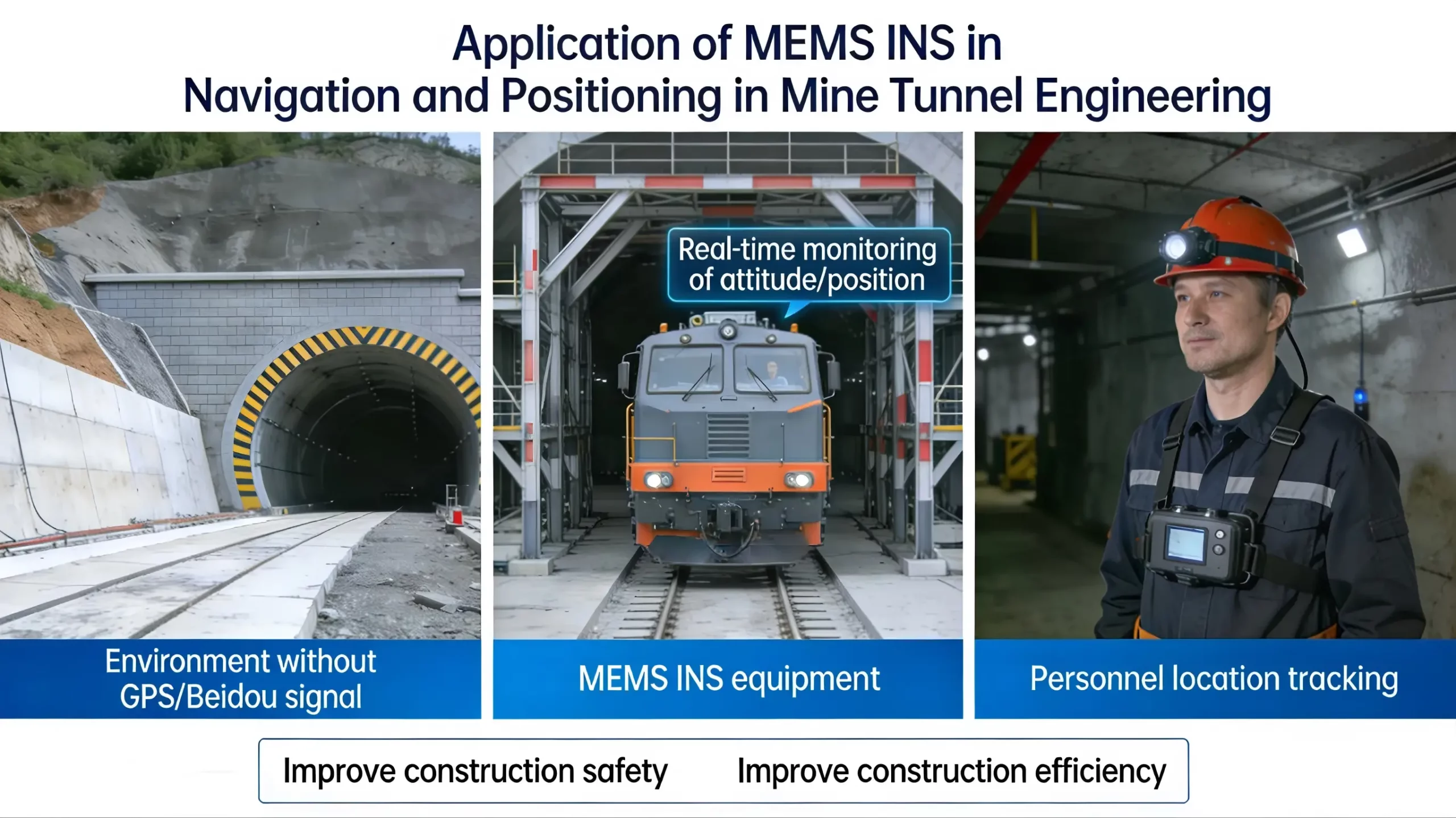
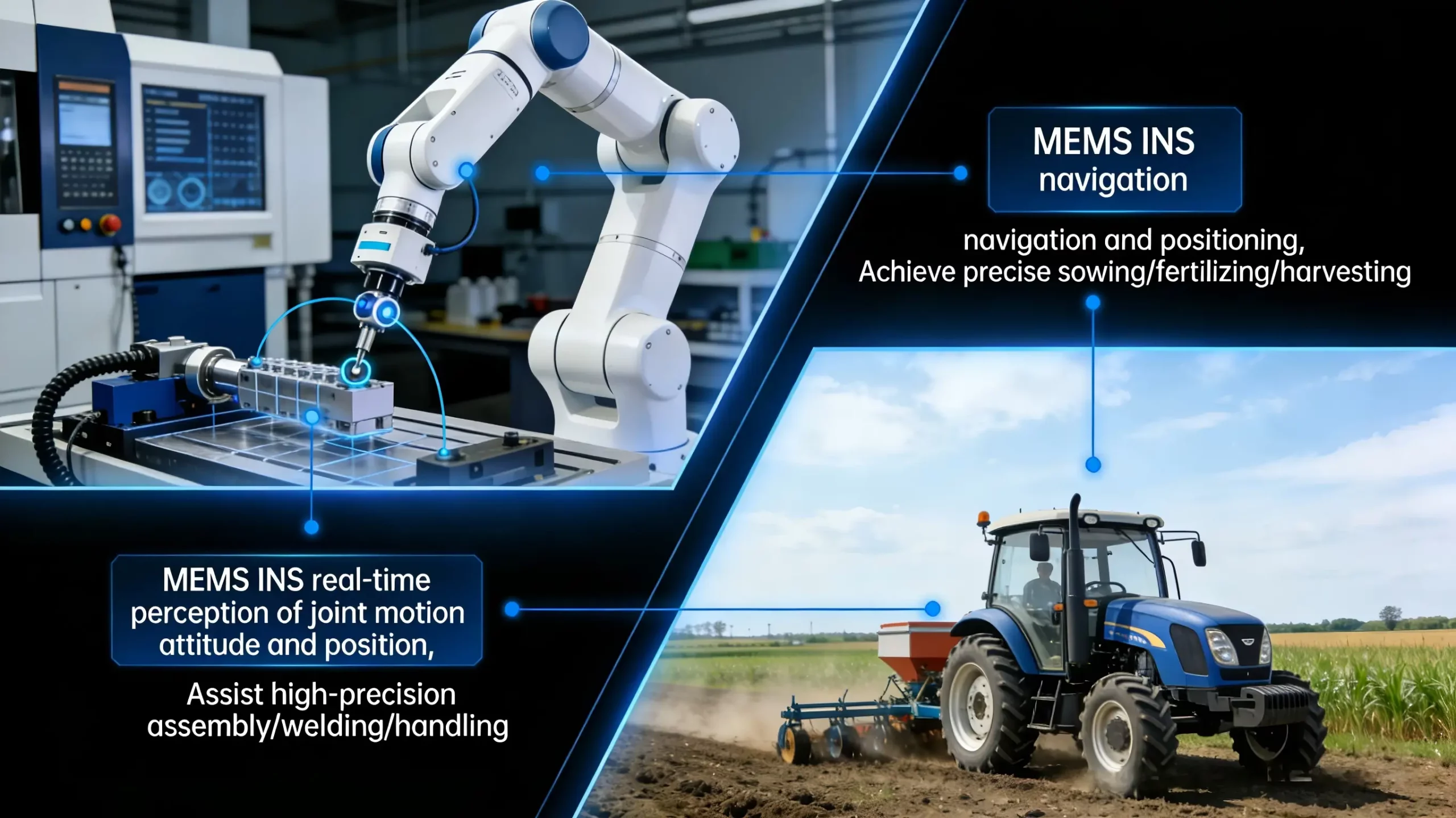
Key Application Scenarios of MEMS INS
MEMS inertial navigation system technologies are pivotal in modern autonomous systems.
About NovaSys——Leader in MEMS Inertial Navigation Solutions
Exploring the capabilities of the MEMS inertial navigation system opens new avenues for innovation.
The MEMS inertial navigation system plays a vital role in enhancing drone navigation.
NovaSys is a trusted provider of autonomous navigation solutions, with enhanced technological advantages in MEMS inertial navigation, dynamic positioning, and multi-fusion sensor fields. We deliver positioning capabilities for unmanned systems and smart devices, and our products are optimized for miniaturization, high performance, and low power consumption. Our technologies drive innovation in sectors such as unmanned aerial vehicles (UAVs), unmanned ground vehicles (UGVs), robotics, smart devices, surveying and mapping, and security applications. Explore our industry-leading offerings: Our positioning solutions achieve navigation-grade positioning accuracy. Even when GNSS signals are lost, our reliable inertial navigation technology ensures seamless switching and continuous system operation.
NovaSys offers advanced solutions incorporating the MEMS inertial navigation system for various applications.
.png)