.png)
This system adopts vision-inertial integrated navigation, enabling the aircraft to operate independently of satellite navigation. It continuously outputs position, heading and attitude information throughout the entire flight from takeoff to landing.
The system mainly consists of barometer, vision board, MEMS IMU, integrated navigation algorithm board, as well as visible light and infrared cameras.
The integrated algorithm fuses satellite navigation, vision navigation, high-precision MEMS pure inertial navigation and attitude heading reference algorithms. With built-in confidence evaluation rules, it can automatically switch among GNSS, vision and inertial navigation modes, ensuring 24/7 output of the aircraft’s longitude, latitude, altitude, heading and attitude data.
When the aircraft flies over areas where vision positioning is unavailable, such as oceans, grasslands, lakes and deserts, the system will activate our tactical-grade high-precision MEMS inertial navigation system to maintain reliable positioning accuracy.
| Category | Parameter | Condition | MVIN-15 Value |
|---|---|---|---|
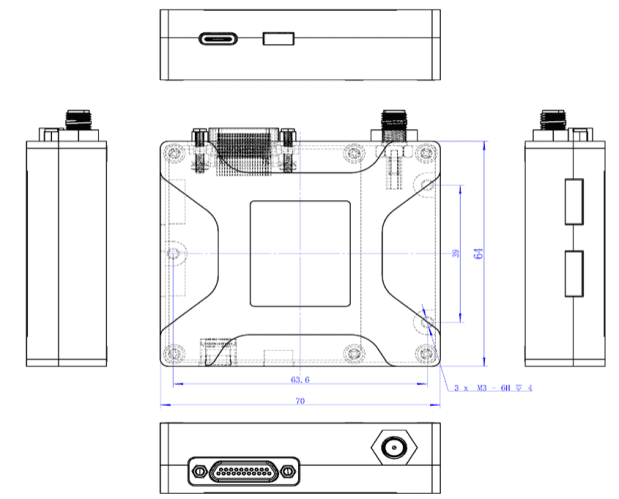
| Physical Specifications | Dimensions & Weight | - | (70 × 64 × 20) mm; ≤ 200 g |
| Power Consumption / Supply | - | < 20 W / 12–32 V | |
| Communication / Interfaces | - | Mavlink / Ublox, RS232 / RS422 / UART | |
| Mapping Area | - | 20,000 km² ~ 200,000 km² | |
| Output Rate | - | 1 ~ 10 Hz | |
| Operating Temperature | - | -40 ℃ ~ +70 ℃ | |
| Shock Resistance | - | > 500 g | |
| Max. Supported Flight Speed | - | ≥ 250 m/s | |
| Terrestrial Positioning Accuracy | Latitude/Longitude Accuracy | 50 m ≤ Flight Height ≤ 500 m | ≤ 15 m |
| 500 m ≤ Flight Height ≤ 5000 m | ≤ Flight Height × 2% | ||
| Altitude Accuracy | - | ±1 m | |
| Attitude Accuracy | - | 0.03° ~ 0.5° | |
| Dead Reckoning in Vision-Denied Areas | Pure Inertial Cross-Cover (5 min) | 15 km (Typical speed: 180 km/h) | MEMS pure inertial navigation |
| Max. Lateral Position Drift (5 min) | 50 m | MEMS pure inertial navigation | |
| Pure Inertial Cross-Cover (30 min) | 90 km (Typical speed: 180 km/h) | MEMS pure inertial navigation | |
| Max. Lateral Position Drift (30 min) | 2 km | MEMS pure inertial navigation |