
The company has accumulated a series of key technologies during R&D to ensure the product’s high performance, including advanced deep reactive ion etching (DRIE) and wafer-level packaging processes, which are crucial for improving the precision and stability of MEMS inertial devices. These advanced manufacturing processes ensure excellent consistency, repeatability and reliability of each sensor unit of the MEMS IMU-8008.
Meanwhile, the system adopts high-speed sampling (up to 12KHz), full-temperature static error compensation (for zero offset, installation error, etc.), and dynamic error compensation technologies, ensuring optimal performance during user operation. The high-speed sampling rate enables the MEMS IMU-8008 to capture rapid and subtle motion changes, while the dynamic error compensation technology effectively suppresses error accumulation caused by complex motion scenarios, further improving measurement accuracy.
The MEMS IMU-8008 also supports in-system software upgrade, allowing users to continuously optimize product performance after deployment, adapting to the evolving needs of industrial applications. It complies with strict quality control standards certified by ISO 9001 and ISO 16750, ensuring that each product meets the highest industrial standards.
Widely used in vehicle positioning and orientation, radar/infrared antenna stabilization platforms, UAV attitude reference and trajectory control, projectile flight control, and port measurement systems, the MEMS IMU-8008 provides stable, real-time and high-accuracy motion data support. For more details on its compatibility with Honeywell HG4930, you can visit Honeywell HG4930 official product page (external link) and our MEMS IMU-8008 product series page (internal link) to learn more about substitution solutions.
| Performance Specifications | |
|---|---|
| MEMS Gyroscope | |
| Range (°/s) | ±400 |
| Full-Temp Bias (°/h) | ≤2 (Optional ≤1) |
| Bias Stability (°/h, 10s Smooth) | ≤0.5 (Optional ≤0.3) |
| Bias Stability (°/h, Allan) | ≤0.05 |
| Bias Repeatability (°/h) | ≤0.3 |
| Angle Random Walk (°/√h) | ≤0.05 |
| g-Dependent Term (°/s/g) | ≤0.0005 |
| Cross-Coupling (rad) | ≤0.001 |
| Scale Factor Nonlinearity (ppm) | ≤100 |
| Bandwidth (Hz, Adjustable) | 100 |
| MEMS Accelerometer | |
| Range (g) | ±20 |
| Full-Temp Bias (mg, 1σ) | ≤1 |
| Bias Stability (μg, 10s Smooth) | ≤100 |
| Bias Stability (μg, Allan) | ≤30 |
| Bias Repeatability (μg) | ≤100 |
| Scale Factor Nonlinearity (ppm) | ≤150 |
| Cross-Coupling (rad) | ≤0.001 |
| Bandwidth (Hz, Adjustable) | 100 |
| Electrical & Mechanical | |
| Power Supply (V) | 5±0.2 |
| Power Consumption (W) | Typical 2, Max 3 |
| Start-up Time (s) | 2 |
| Communication Interface | 1×RS-422, 1×Synchronous Input, 1×Synchronous Output |
| Update Rate (Hz) | 200 |
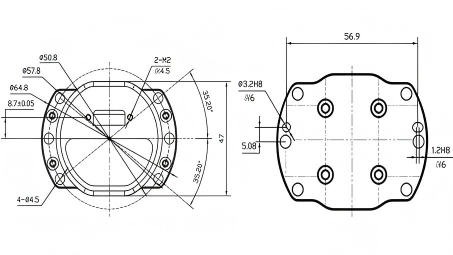
| Dimensions (mm×mm×mm) | 64.8×47×35.3 |
| Weight (g) | 165±5 |
| Environmental Adaptability | |
| Operating Temperature (°C) | -40 ~ 80 |
| Storage Temperature (°C) | -55 ~ 85 |
.png)