Main Features The Vision Feature Matching Navigation Module provides UAV visual positioning, intelligent ground target recognition/tracking, and geolocation functions, meeting navigation and positioning requirements in GNSS-denied environments. Application Fields Based on the map-matching principle, this module performs visual positioning for aircraft and outputs latitude and longitude information (via serial port to the navigation control system). Its compact design makes it widely suitable for various unmanned aerial vehicle systems.
VMN-S160
Technical Parameters
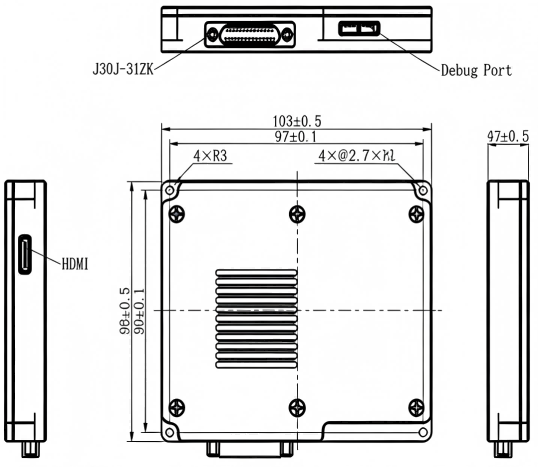
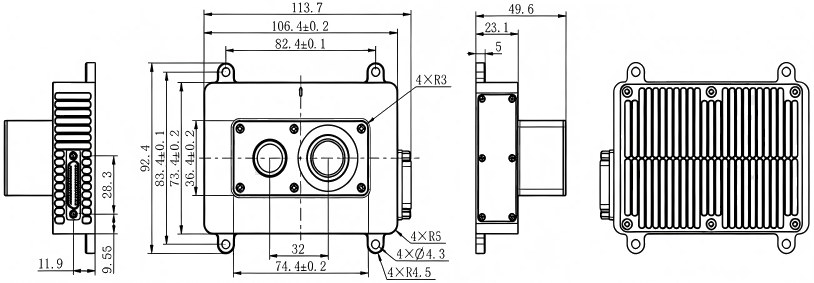
Dimensions
(103×86×15) mm
Weight
≤150g
Supply Voltage
18V ~ 32V
Power Consumption
≤15W
Camera Type
Visible Light or Infrared Camera
Visible Light Resolution
1600×1200
Infrared Resolution
640×512 (Optional)
Camera Interfaces
SDI, Mipi, USB
Interface 1
2×RS422 (for communication with flight computer)
Interface 2
2×Ethernet (for program update, debugging and map data download)
.png)