.png)

| Performance Specifications | |||
|---|---|---|---|
| MEMS Gyroscope | |||
| Model | MU4001 | MU4002 | MU4003 |
| Range (°/s) | 500 | 500 | 500 |
| Bias (°/h) | 10 | 3 | 1 |
| Bias Stability (°/h, 10s smoothed) | 3 | 0.8 | 0.3 |
| Bias Repeatability (°/h) | 3 | 0.8 | 0.3 |
| Scale Factor Nonlinearity (ppm) | 100 | 100 | 50 |
| Bandwidth (Hz) | 100 | 80 | 80 |
| MEMS Accelerometer | |||
| Range (g) | 40 | ||
| Bias (μg) | 1000 | ||
| Bias Stability (μg) | 80 | ||
| Bias Repeatability (μg) | 100 | ||
| Scale Factor Nonlinearity (ppm) | 300 | ||
| Bandwidth (Hz) | 100 | ||
| Electrical & Mechanical | |||
| Power Supply (V) | 5±0.2 | ||
| Power Consumption (W) | <1 | ||
| Start-up Time (s) | 2 | ||
| Communication Interface | RS-422 | ||
| Update Rate (Hz) | 200 (customizable, max 1000) | ||
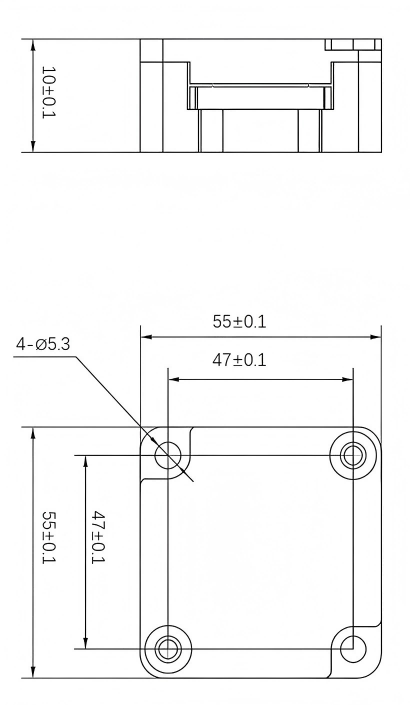
| Dimensions (mm×mm×mm) | 44.8×38.6×21.5 | ||
| Weight (g) | 60 | ||
| Environmental Adaptability | |||
| Operating Temperature (°C) | -45 ~ 80 | ||
| Storage Temperature (°C) | -55 ~ 85 | ||
| Vibration (g, Rms) | 7.72 | ||
| Shock (g) | 1000g/1ms (with cable) | ||
| Reliability | |||
| MTBF (h) | 20000 | ||