.png)
High-Precision North Finding Based on MEMS Technology
The MS20062 MEMS Integrated Navigation System is a highly reliable, cost-effective inertial navigation solution, widely used for navigation, control, and measurement in vehicles, vessels, UAVs, and other platforms.It integrates high-performance MEMS gyroscopes, accelerometers, and a GNSS chip to calculate heading, 3D velocity, position, and attitude in real time. Built-in full-temperature compensation ensures reliability, with configurable operating modes for airborne, land, and marine applications.
Advanced Manufacturing Processes & Technology
Leveraging leading MEMS processes, it integrates inertial components with performance comparable to low-precision fiber-optic gyroscopes. Full-temperature parameter compensation maintains high accuracy, and an adaptive navigation algorithm ensures stable long-term attitude measurements.
Core Self-Aligning Technology
Equipped with high-performance gyroscopes, the system achieves initial north finding without dual-antenna assistance, enabling fast convergence and sustained high accuracy during dynamic navigation.
| Performance Specifications | |
|---|---|
| Core MEMS Components | |
| Gyroscope | ±500°/s range, ≤2°/h (XY) bias instability, ≥100Hz bandwidth |
| Accelerometer | ±16g range, ≤50μg bias instability, ≥100Hz bandwidth |
| Navigation Accuracy | |
| Integrated Navigation | Heading: 0.15° (Dual Antenna)/0.5° (Single Antenna); Position: 3m (Single Point)/0.02+1ppm (RTK) |
| Pure Inertial Navigation | Horizontal attitude: 0.05° (Static)/0.5° (Dynamic); Heading: 5° (Dynamic) |
| Electrical & Mechanical | |
| Power Supply | 9~36V DC, Steady-state Power ≤3W |
| Interfaces | RS-422 / RS-232 / CAN |
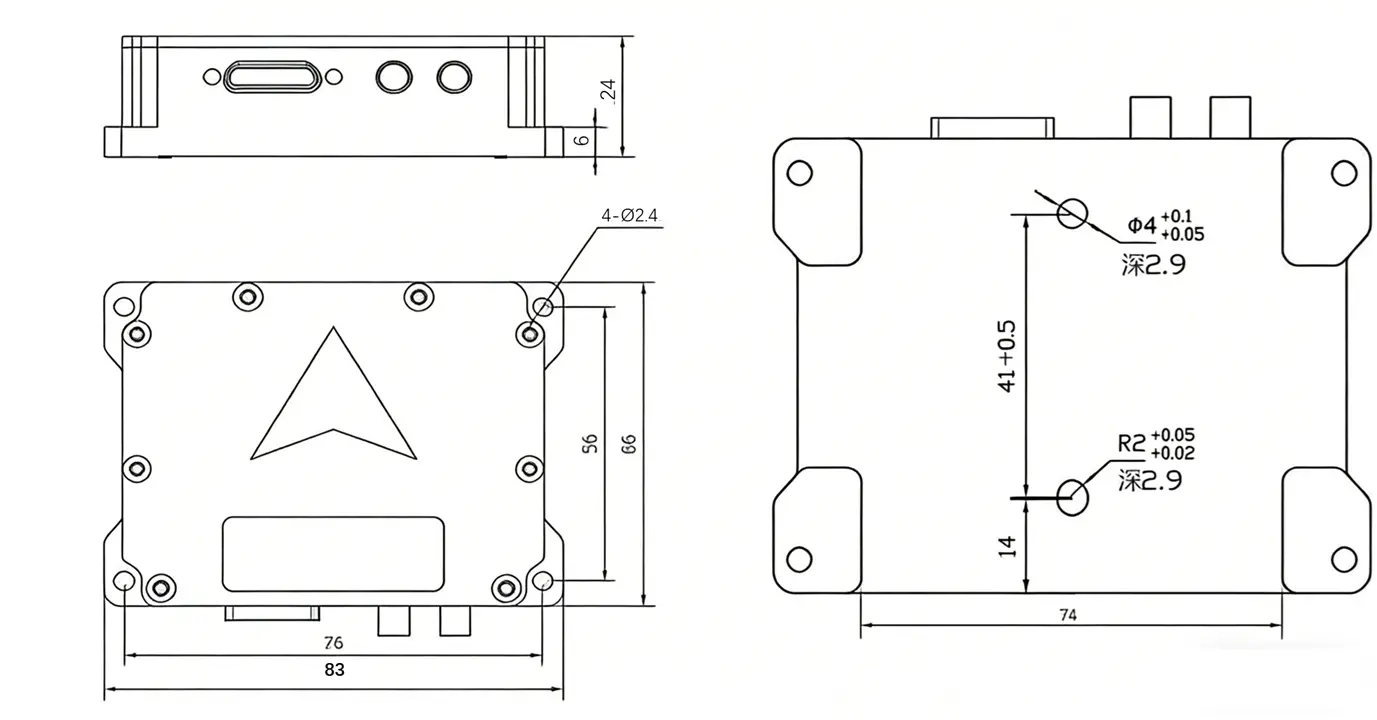
| Dimensions & Weight | 83×66×24mm, < 350g |
| Environmental Adaptability | |
| Operating Temperature | -40°C ~ +85°C |
| Storage Temperature | -55°C ~ +85°C |